Géolocalisation et perception pour la conduite automatisée
Au bénéfice de la fiabilité et de la sécurité
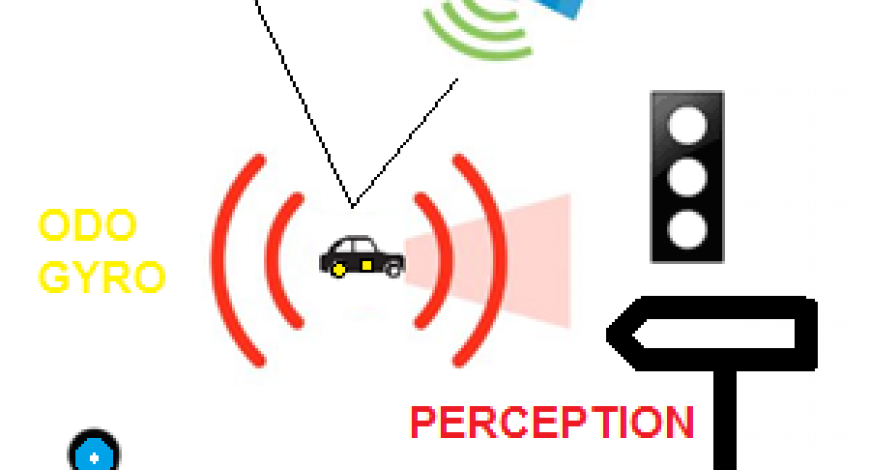
Les développements pour le véhicule autonome devront tirer parti de la redondance des systèmes et des approches pour garantir la sécurité des personnes et la fiabilité du système : les processus de localisation s’alimenteront de l’odométrie et de l’intégration inertielle, couplées aux GNSS (Global Navigation Satellite Systems) et aux mesures faites sur des amers, dûment connus en 3D, perçus et reconnus.